Change to tabbed view
In the top left corner of the switch block, there is a small button that toggles Tabbed View. This compresses the switch slightly so that it only shows one case at a time, and you can switch between the two cases using the tabs at the top of the switch. We will be writing a lot of programming in the true case of the switch, so selecting tabbed view will streamline the program a bit.
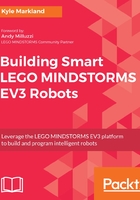
After selecting tabbed view, the switch will reconfigure itself and the code will look like this:

We have finished the false case of the switch! The robot will check IR 2 to see whether a beacon is present. If there are no nearby beacons, the robot will halt all of its motors and wait until one comes within sight. But what if there is a beacon present?
Use the tabs at the top of the switch to select the true case. It is now time to start programming the true case:
